Introduction
This is my new project to build an autonomous omnidirectional robot. Main component Specs:
- A Beaglebone Green (wireless)
- 3 Omni Wheels
- 3 NEMA 14 Stepper Motors
- 3 Pololu DRV8834 Stepper Drivers
- HC-SR04 Ultrasonic Rangefinders
- 6600mAh LiPo Battery
First Prototype
Quite some time has been spent not so much on building the first robot, but sepecially to get the software up and running. Especially an issue with the stepper drivers used at first (see this link), and getting started with the Beaglebone Programmable Real Time Units in C.
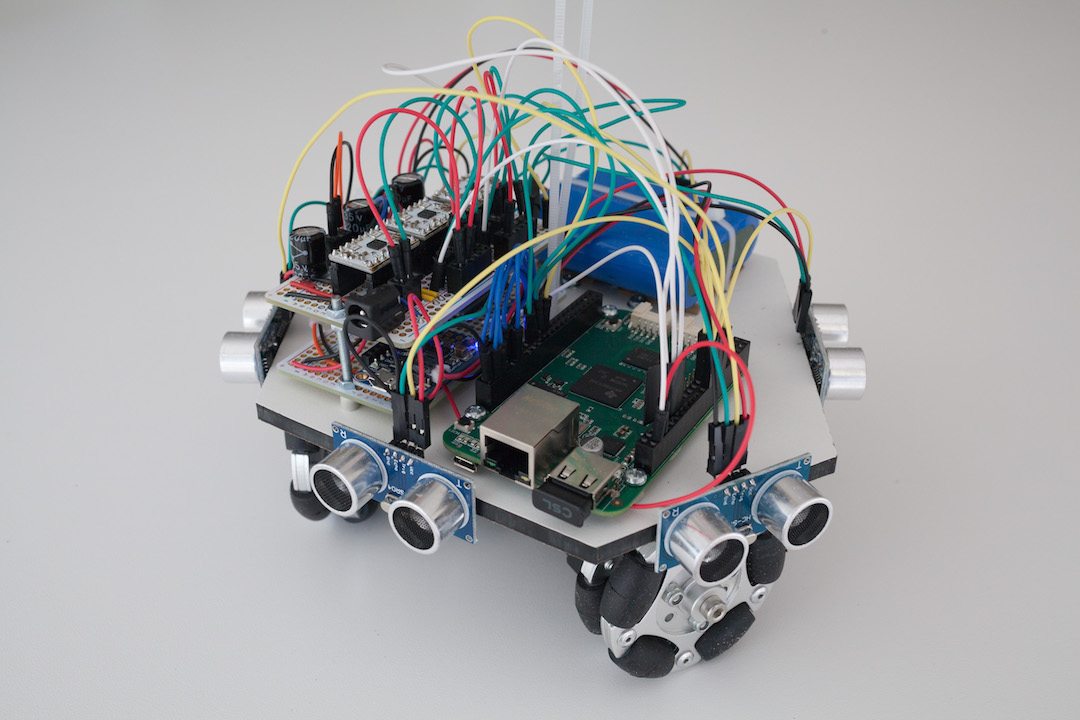
Below a picture of the first prototype.
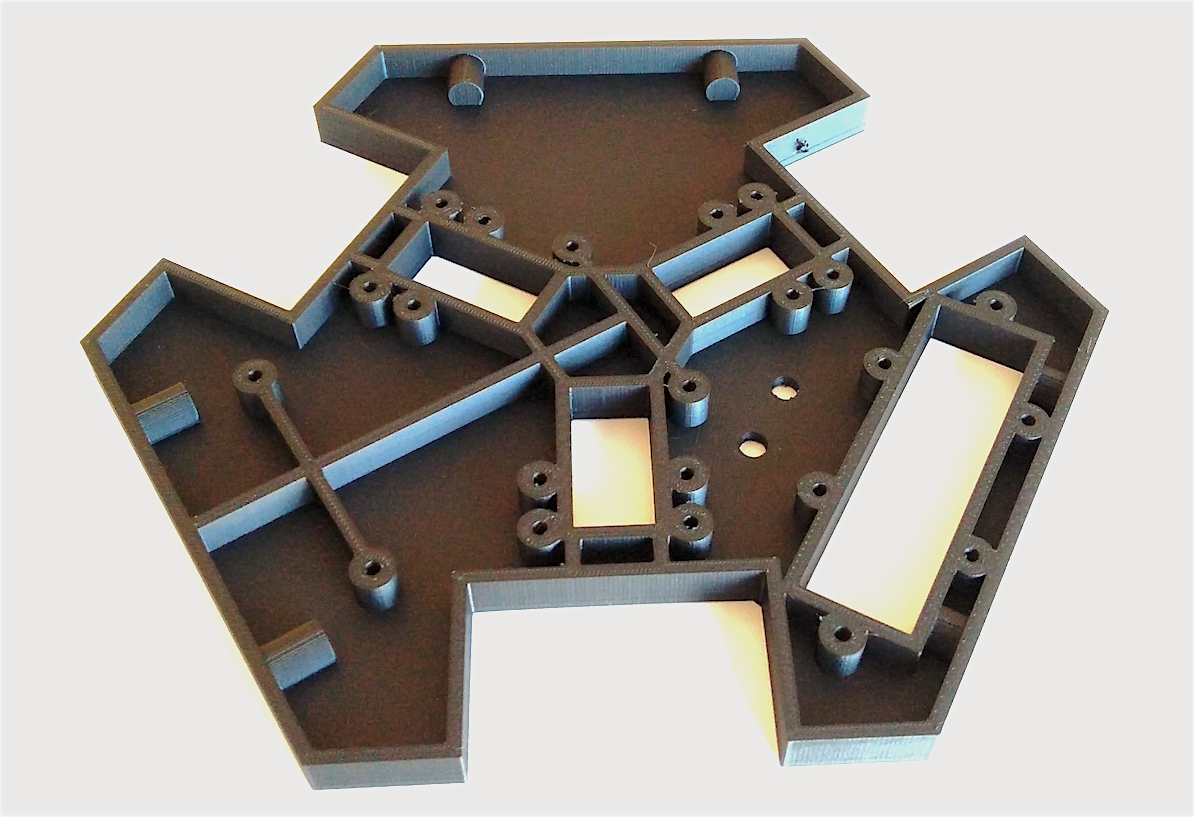
Improved Version
Working on a new version with 3d printed parts.